
Physics simulations are a fundamental part of interactive 3D experiences, enabling realistic object behavior. While most game engines include rigid body physics by default, soft body physics—where objects deform on impact and return to a stable shape—presents additional challenges. Unlike rigid bodies, soft bodies require tracking deformation across a mesh while maintaining volume and structural integrity. The complexity of these calculations increases significantly with high-poly models and intricate shapes, making standard approaches inefficient.
To address this, I developed a system that balances accuracy and performance by structuring the mesh with a simplified rig and applying physics forces to that rig rather than directly to the vertices. This approach allows for realistic deformations while keeping computations manageable.
Link to GitHub repo
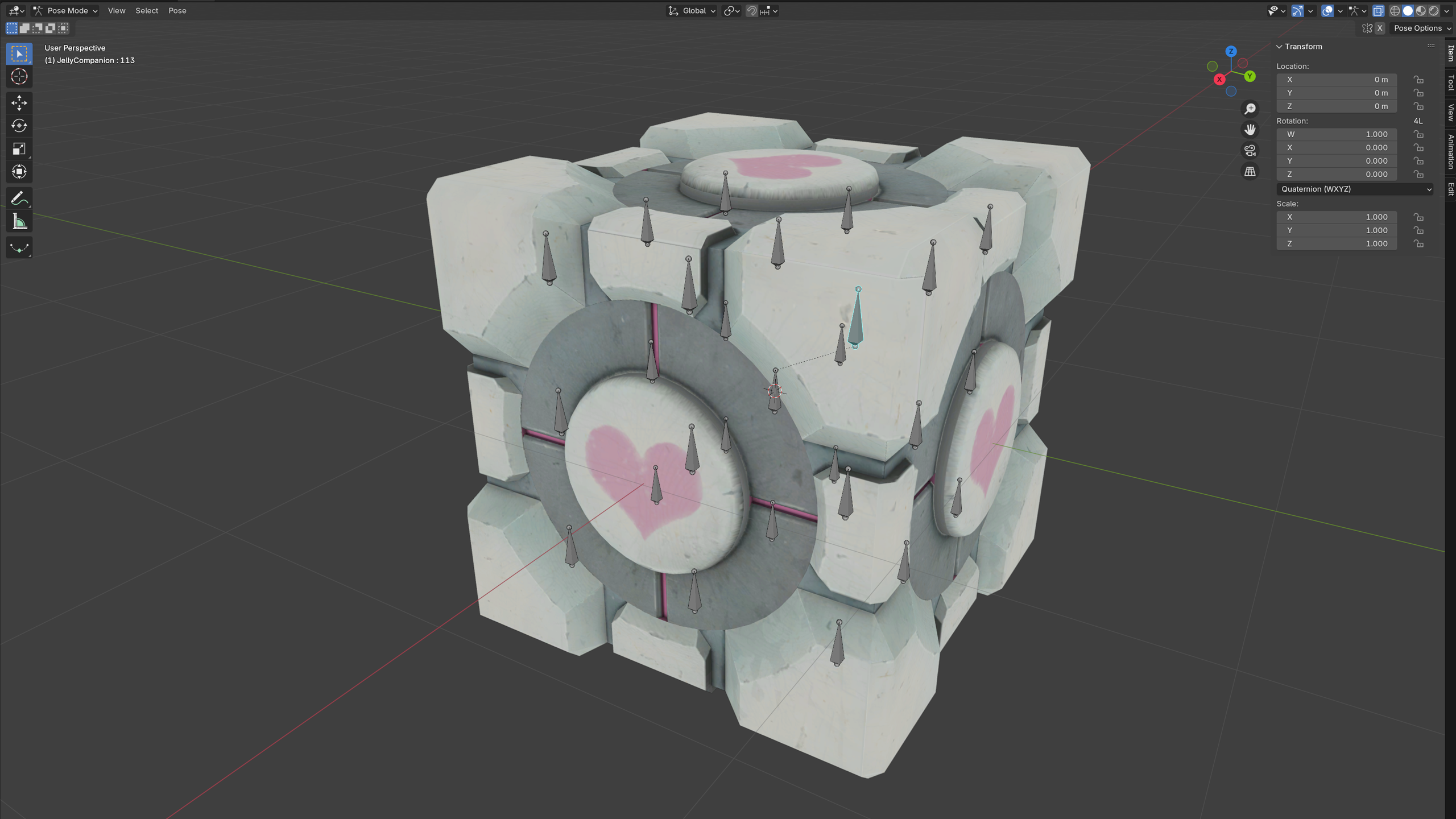
1. Creating a Rig
Rather than applying physics directly to vertices, a skeletal rig can group vertices into controllable sections. This rig acts as a simplified representation of the object’s structure, allowing for more efficient physics calculations.
By carefully considering the model’s volume and shape, artists and developers can define bones that serve as these deformation points.
This setup significantly reduces computational overhead while maintaining the flexibility needed for soft body motion.
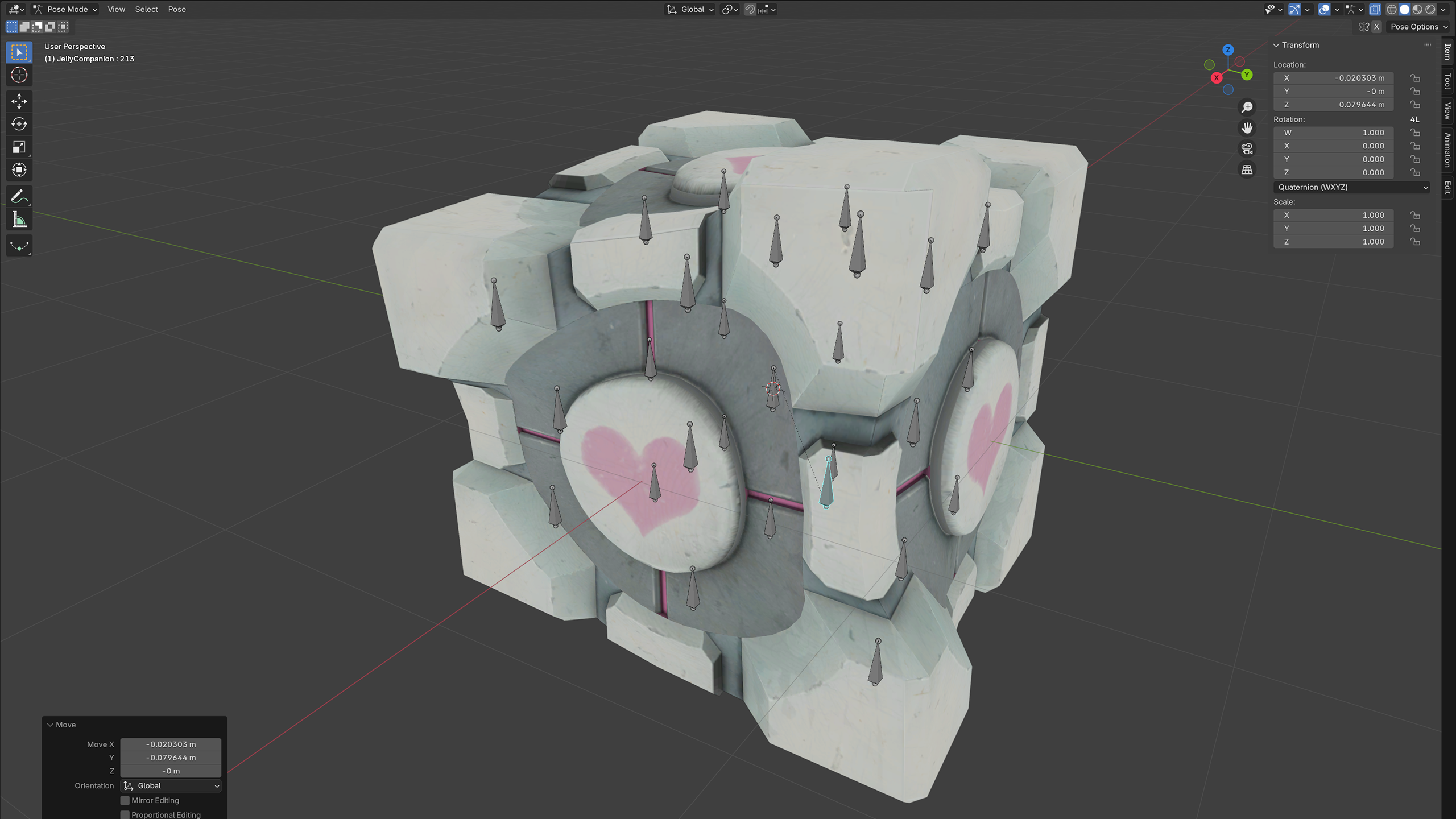
2. Applying Physics to Rig
Each bone in the rig is treated as an independent rigid body, allowing it to respond to external forces and collisions. As forces act on the bones, they shift position, causing the mesh to deform, stretch, and compress dynamically. This approach leverages Unity’s built-in physics system while introducing a soft body effect through constrained bone movement.
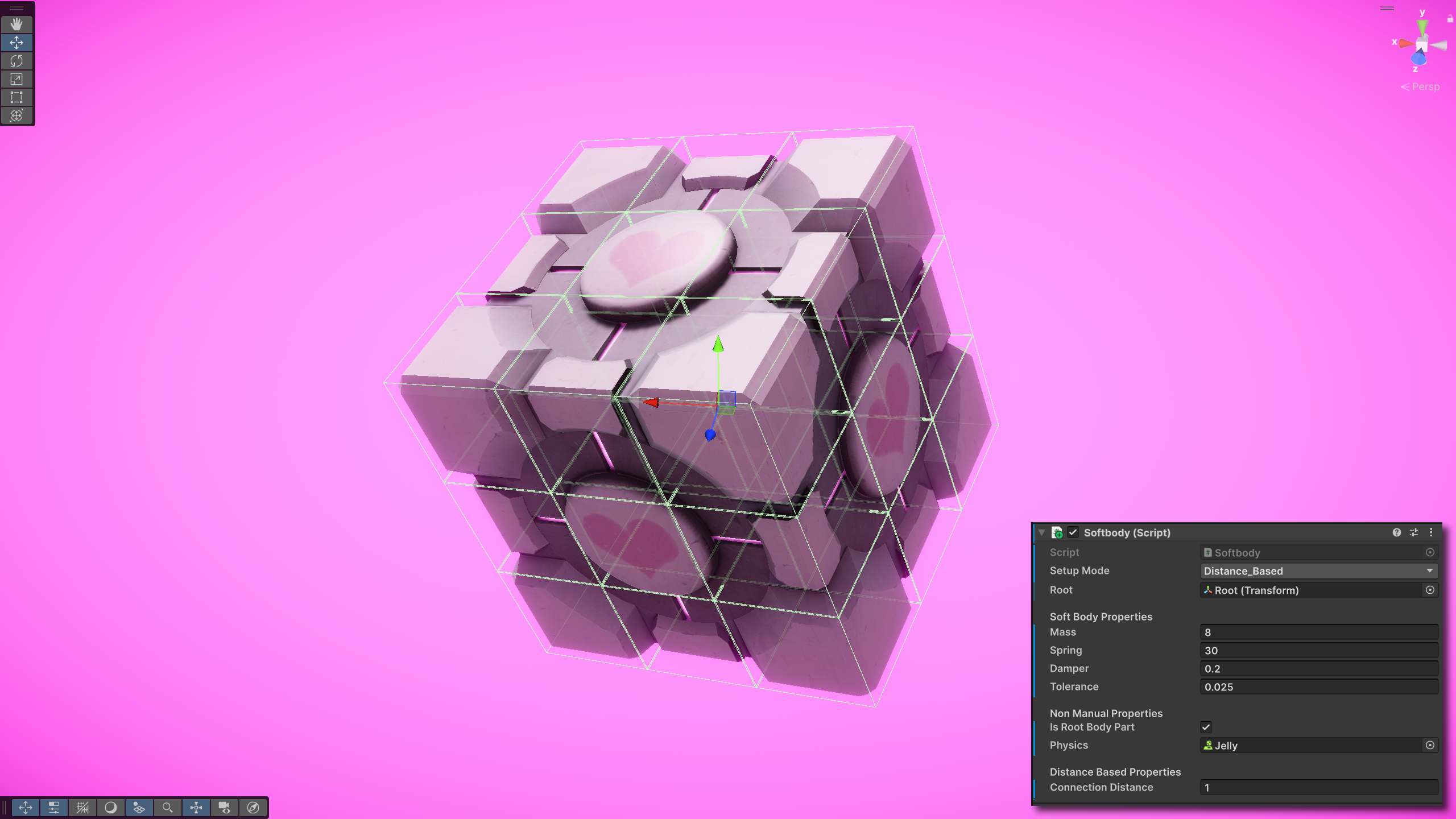
3. Applying a Spring Force
Apply a spring force between neighboring bones transforms the simulation from a series of hard body objects to a single soft body object. These forces act as constraints that continuously pull displaced bones back toward their original positions, helping the object retain its shape. This allows the soft body to be interactable with the world while still recovering naturally after deformations. By adjusting the strength and damping of these springs, I can fine-tune how quickly and smoothly the object returns to equilibrium, achieving a balance between realism and performance.
